| <<Vol. 2 Table of Contents | |
|
|
|
|
2007 |
Volume 2, pp 111-124 |
Spatial Navigation: Spatial Learning in Real and Virtual Environments
Debbie M. Kelly
University of Saskatchewan
Brett M. Gibson
University of New Hampshire
|
|
|||||||||
|
|||||||||
|
Humans and many non-human animals need to accurately and efficiently navigate from one place to the next in their environment. Over 3,000 years ago the volcanic islands of the Pacific were settled by the people of Polynesia (Gibbons, 2001). These navigators sailed in craft from Samoa to Hawaii covering an area extending some 4,500 km without the benefits of modern navigational equipment. Errors in the estimation of direction or position during trips to and from the islands in this region could have dire consequences. Some 2,400 years later, European sailors had started mastering oceanic navigation and were probably surprised to discover that people had already traveled to, and were living on, these remote Pacific islands. Today, few humans make such long trips without the benefits of modern navigational tools. Many non-human animals were engaging in impressive feats of navigation long before people were navigating across oceans. Desert ants (Cataglyphis fortis) live in subterranean nests that insulate them from arid conditions above ground. During the course of the day foraging ants depart their nest in search of food, in this case other insects that have succumbed to the desert heat. The foraging desert ant may be required to take a rather long (several hundred meters) and circuitous route before it finds a food item, since the location of food items vary dramatically from day to day. Once the foraging ant has found food, it takes a direct route back to the entrance of the subterranean nest (Wehner, 2003). Errors in the estimation of the nest location could easily prove fatal. Notably, like an early human navigator on the ocean, the ant’s impressive feat of navigation is accomplished in a relatively homogeneous environment lacking surfaces that could be used as landmarks to help indicate the position of the nest. These two examples help to introduce the idea that survival within an environment may require that an animal (including humans) navigate to goals over short distances, such as a few meters (e.g., the desert ant), or over distances encompassing several hundred kilometers (e.g., the Polynesian sailors). How are such navigational feats accomplished? When the goal location is not visible, perhaps because it is far away or occluded, the navigator must use his/her memory to navigate. How is this memory or representation of the spatial environment stored in memory? Two prominent theoretical perspectives have guided research designed to investigate this question within the context of place learning. On the one hand, a theoretical approach to spatial learning has grown out of the principles of associative learning. This approach proposes that the process of learning about one’s environment is subject to the same rules as other forms of learning. As one moves through an environment associations are built between stimuli, such as objects in the environment, and responses, such as walking towards an object; spatial learning follows conventions of classical and instrumental conditioning. On the other hand, cognitive mapping theory proposes that spatial place learning is different from other forms of learning. In particular, it is proposed that a topographical representation of one’s environment is constructed in the hippocampus (O’Keefe & Nadel, 1978). According to this approach, initially proposed by Tolman (1948), spatial representations allow for flexible navigation to a goal location from familiar or novel positions with equal capacity. These two theoretical approaches allow for interesting predictions as to the form of the representation stored in memory as well as the susceptibility of the representation to cue competition. According to the associative approach, a representation of one’s environment is incrementally built with continued experience with the environment. Thus, the navigator forms egocentric-based, or viewpoint dependent, representations of the environment. In contrast, the topographical representation proposed by the cognitive mapping theory would be stored viewpoint independent. The associative approach to spatial learning further predicts that the learning of spatial information is subject to cue competition. Two classic forms of cue competition are blocking and overshadowing. In blocking, a conditioned stimulus prevents conditioning of a subsequently presented stimulus – the first conditioned stimulus blocks conditioning of a second stimulus. Whereas in overshadowing, a salient conditioned stimulus can interfere with the conditioning of a less salient stimulus – the salient conditioned stimulus overshadows the weaker conditioned stimulus. The associative approach to place learning predicts that spatial learning would be susceptible to cue competition, whereas cue competition is not likely to be evident in spatial learning, according to the cognitive mapping theory, as additional spatial cues would provide a more detailed topographical map. A great deal of our understanding of place learning is rooted in animal studies (e.g., Olton & Samuelson, 1976; Tolman, 1948; for reviews see Gallistel, 1990; O’Keefe & Nadel, 1978; Redish, 1999; Shettleworth, 1998; Wang & Spelke, 2002). The focus of this review is to examine the two theories of place learning through the examination of current research using three main behavioral techniques, developed for the study of spatial navigation in animals, but modified for the study of human spatial navigation. We will begin this review with a general overview of the three behavioral tasks as developed to study place learning in non-human animals, providing one example of a research investigation of spatial place learning to demonstrate the task. This part of the review is meant only as an overview to provide a general understanding of the research area for comparative purposes; a complete review would be considerable and well beyond the scope of our review (interested researchers are encouraged to refer to volumes such as O’Keefe & Nadel, 1978; Redish, 1999). We will briefly discuss how these techniques have not only furthered our understanding of the associative approach and the cognitive mapping theory at a behavioral level, but also strengthened our understanding of the neurological mechanisms of place learning. Next, we will turn to the area of human navigation, focusing on how the three behavioral techniques have recently been adopted, and modified, for study of human spatial abilities using virtual environments. Again, our review of these studies will focus on whether the results support an associative approach or a cognitive mapping approach to spatial learning. Finally, we will discuss how the use of these behavioral techniques represents an excellent opportunity for future comparative studies of spatial learning. Non-Human Animal Research: Three Prominent Tasks Over the past several decades, three laboratory based paradigms, the Morris-type water maze task, the radial arm maze task, and the geometric arena task, have been extensively used to investigate spatial learning in non-human animals. Morris-type water maze task
The Morris-type water maze task (MWM; Morris, 1981) has a long history of use in investigations of spatial cognition with non-human animals, primarily rodents (for reviews see Brandeis, Brandys, & Yehuda, 1989; Redish, 1999). For this aversively motivated task a shallow pool is filled with cool water that is made opaque using dried milk or non-toxic paint (see Figure 1). A platform, which is the goal, is positioned at a fixed location in the pool and rests just below the surface of the water so that it is not visible. The animal is typically released from the side of the pool and searches for the hidden platform to allow it to escape from the cool water. With continued experience in the pool, the animal becomes very efficient at locating the hidden platform. (Efficiency is typically seen by the animal making a more direct path from its starting location to the hidden platform; see Video Clip 1 showing an example of a mouse performing a MWM task.) A strength of the MWM task is that it can be used to investigate a variety of different navigational systems as well as the types of spatial cues animals use when navigating. For instance, many researchers have used this task to learn about how rats use individual objects or configurations of multiple objects as landmarks to find the hidden platform. Roberts and Pearce (1999), for instance, designed an experiment to examine whether blocking would be evident in a spatial task using the MWM. In the first phase of the experiment, the investigators trained rats to locate a submerged platform that had an object attached directly to the platform. Thus, the rats simply needed to swim directly to the object to find the platform (a behavioral strategy known as beaconing). The second phase of the experiment was identical to the first, with the exception that distinctive visual cues were placed around the maze (extramaze cues). Thus, in this second phase the rats could continue to use the beacon to find the submerged platform or they could also encode the extramaze cues—allowing them to find the platform with either the beacon and/or the extramaze cues. To examine whether the rats had encoded the extramaze cues (from the second training phase) the investigators concluded the experiment with a test phase in which both the platform and the beacon were removed. If the rats had encoded the extramaze cues, they should have been able to swim directly to the location of where the platform should have been located. However, if the rats had not encoded the extramaze cues—the learning of the beacon in the first phase blocked the learning of the extramaze cues in the second phase—the rats would not know where to search for the platform. Indeed the latter was the case; the rats swam randomly in search of the platform. The study by Roberts and Pearce is particularly interesting because it supports the associative account of spatial learning. Radial arm maze The radial arm maze task (RAM; Olton & Samuelson, 1976), like the MWM, also has a long history of use by researchers interested in the spatial cognitive abilities of animals (see Hodges, 1996). A typical RAM consists of eight flat "arms" that extend out from a central platform (see Figure 2). Radial arm mazes are often elevated and/or have side walls that may be or may not be fully enclosed so that the animal stays on the maze while completing the task. Food can be placed in cups or wells at the distal end of one or more of the arms. During a typical session, an animal is placed in the center of the maze and allowed to retrieve food from the distal ends of four arms (see Video Clip 2 showing an example of a rat performing in a RAM task).
Following a retention interval of variable length, the animal is placed back on the maze and permitted to search any of the eight arms. If the animal has encoded the locations of the arms that it has previously visited into working memory, then it should limit its searching to only those arms that it has not already visited. Like the MWM, the RAM can be arranged to investigate the use of a variety of different navigational cues. The RAM has been used to investigate the use of egocentric mechanisms of navigation (Ossenkopp & Hargreaves, 1993), local cues identifying each arm (Diez-Chamizo, Sterio, & Mackintosh, 1985), the use of distal room cues (McDonald & White, 1993), the interaction between several types of cues (Diez-Chamizo et al., 1985; Gibson & Shettleworth, 2005), and even episodic-like memory (Babb & Crystal, 2005). While the RAM was originally developed for use with rats, analogues of the RAM task have been used with mice, rabbits, hedge hogs, guinea pigs, corvids, pigeons, and chickens (for a review see Lipp et al., 2001). Recently, Gibson and Shettleworth (2005) used the radial arm maze to examine whether learning about the response required to travel to a goal location would interfere with learning about the physical place of the goal within the larger environment. Theories of associative learning would suggest that these two types of cues should compete with each other for control of behavior, whereas cognitive mapping theory would suggest that learning about the response required to get to a goal and learning about the location of a goal should not compete with each other (i.e., both should be acquired simultaneously and without competition). In this study, the researchers used an associative blocking paradigm (Experiments 3-5) to examine if prior response learning would interfere with subsequent place learning. During the first training phase, one group of rats (referred to as "group Same" for reasons which will become clear) was released from the distal end of a start arm; they were trained to travel through the center of the maze and, once the center was crossed, to make a consistent turn (e.g., cross the center and always turn right). This response would allow the rats in this group to arrive at the arm that contained food. A second group of rats (referred to as "group Different" for reasons which will become clear) was also released from the distal end of a start arm; like the rats in group Same, they were trained to travel through the center of the maze and, once the center was crossed, to make a consistent turn (e.g., cross the center and always turn left). During this initial phase of training the maze was surrounded with an opaque curtain to eliminate place learning. The curtain was removed for the second phase of testing, allowing the rats to learn about the physical place of the goal within the larger experimental room. The location of the reinforced arm in this second phase of testing required that the rats in group Same use the same response as learned during Phase 1 training (e.g., turn right), whereas for the rats in group Different, the response that was now required to arrive at the reinforced arm was different than the response learned in Phase 1 training (e.g., turn right). The third phase of this experiment consisted of preference tests. Both groups were given an opportunity to choose either an arm that was consistent with the response learned from training phase 1, or an arm that was consistent with the place learned from training phase 2. Associative learning theory would predict that the rats in group Same should learn less about the place of the goal, compared to the rats in group Different, since the response used to get to the goal during the experiment was always the same. Thus, for the rats in group Same, learning about a response should block or compete with subsequent learning about the place of food in the room. The subsequent place cues were redundant with the response information. Indeed the rats in group Same showed a strong preference to select the arm that was consistent with the response used to get to the food, rather than the arm that was consistent with the place of food during training. The rats in group Different did not display such a preference for either the response or the place response. Thus, for group Different, learning about the response did not block learning about the place, as was seen with the rats in group Same, because the learning in the second phase of training provided new information. Again, the results of these experiments support an associative learning approach to spatial learning. Geometric arena task
More recently, a third behavioral task has been developed to examine whether animals can use the shape of the environment itself when navigating, or more specifically during the initial orienting step of navigation (Cheng, 1986; Margules & Gallistel, 1998). In this task an animal is disoriented (usually by slowly rotating the subject in a small container) before being placed in a fully enclosed environment. In the original investigation, and many subsequent studies, the environment is rectangular in shape and several distinctive objects or panels are placed at each corners of the environment (see Figure 3). A reward is hidden in one corner of the environment and the animal’s task is to search for this food reward. Transformation tests, which manipulate one or more properties of the nongeometric (the distinctive objects or features) or geometric (the shape and size of the environment) information, are subsequently conducted to examine what cues the animal had encoded during initial training in the environment. Cheng (1986) initially developed the geometric arena task to examine whether rats could encode featural and geometric properties of the environment. As described above, disoriented rats searched in a fully enclosed rectangular environment for food that was consistently located at one of the corners (a reference memory task). Each corner also contained unique featural cues; each corner had unique color, shape, texture, and scent information. Interestingly, in the reference memory version of the task the rats could learn to search primarily in the corner that contained the hidden food, but they also chose the corner diagonally opposite to the rewarded corner more than expected by chance. This error was termed a geometric error, or a systematic rotational error, because according to geometric cues alone this incorrect corner was indistinguishable from the rewarded corner; the two corners were geometrically equivalent. Not only was this the first demonstration that rats were encoding the overall shape of their environment (i.e., geometric information) in a place learning task, but the results also showed that the geometric information had the potential to overshadowing the encoding of the featural cues. (In a working version of the task the geometric cues did indeed overshadow the learning of the features.) This study led to the hypothesis that rats have a geometric module – an encapsulated representation that stores information about an environment’s geometric properties, separate from the featural or non-geometric properties. A plethora of studies followed, examining the encoding of featural and geometric information by other species (e.g., chicks: Vallortigara, Zanforlin, & Pasti, 1990; fish: Sovrano, Bisazza, & Vallortigara, 2002; pigeons: Kelly, Spetch, & Heth, 1998; rhesus monkeys: Gouteux, Thinus-Blanc, & Vauclair, 2001; and humans: Hermer & Spelke, 1994, 1996). Interestingly, many of these studies show that the geometric information does not overshadow learning about the featural properties of the environment. Thus, the results of this research paradigm do not yet clearly support either an associative approach or a cognitive mapping theory of place learning. Neurological Mechanisms: Animal-based Research The three navigation tasks we reviewed outlined above typically require an animal to navigate to a hidden goal location. To successfully locate this goal area the animal must maintain an accurate representation of the environment (Gallistel, 1990). As we have seen, in the MWM and the RAM tasks, this representation can be established using cues in the room that maintain a fixed relationship to goal. In the geometric arena task, the representation may be established using the overall shape of the enclosure (or in some studies additional distinctive featural cues). Single-cell recording studies have found cells that selectively fire when an animal is in a particular location (for a review see O’Keefe & Nadel, 1978). A different population of these cells fire as the animal moves through an environment. The selective activity of these place cells can be used to reconstruct the path of an animal through an environment. This mapping of the environment is argued to support the idea that the hippocampus forms a type of cognitive map. O’Keefe and Dostrovsky (1971) were the first to characterize the presence of cells in the hippocampus of the rat that fire when the animal enters a particular place in the environment. These place cells, the pyramidal cell of the hippocampus and granule cells of the dentate gyrus, comprise 90% of the cells that make up the hippocampus. Studies have shown that place cells acquire their receptive field quite quickly, typically within a few minutes after an animal has been placed in a novel environment, and these cells can retain their field even when landmarks are removed (Muller & Kubie, 1987; O’Keefe & Conway, 1978). Interestingly, however, rats navigating in the dark and blind rats (either blinded late in life or one week postnatal) also show place cell responding when they locomote through an environment (Hill & Best, 1981; Markus, Barnes, McNaughton, Gladden, & Skaggs, 1994; Save, Cressant, Thinus-Blanc, & Poucet, 1998). This illustrates that, for rats, other forms of sensory information in addition to vision must influence place cell firing. One type of sensory input that appears to be important is self-motion or idiothetic information (e.g., Save, Nerad, & Poucet, 2000). Idiothetic information might be essential for encoding geometry (for a review, see Redish, 1999). However, this seems to contrast with studies that show hippocampal cells maintain their spatial tuning even when the subject is passively transported through a darkened room (Gavrilov, Wiener, & Berthoz, 1998; Lackner & DiZio, 2005). Yet, lesions of the hippocampus and related structures have resulted in dramatic deficits in place learning tasks and the salience of environmental geometry (Bingman, Erichsen, Anderson, Good, & Pearce, 2006). A second set of cells that would appear important to navigation and returning to goals in these two tasks are head direction cells (for a review see Taube, 1998). Head direction cells fire when an animal’s head is pointing in a single direction with respect to the environment. Thus, the cells fire when they maintain a particular angle with respect to the broader environment (allocentric relationship) rather than with respect to the animal’s body (egocentric relationship). These cells, many of which are located in the postsubiculum of the rat, would appear to provide important information for formation of a spatial representation. Head direction cells can be sensitive to the movement of distal directional cues such that as the distal cues are rotated, so too are the tuning of the directional cells. Much of what we know about the neurological mechanisms that underlie spatial navigation has been determined through the use of MWM, RAM, and more recently geometric arena tasks. These standardized behavioral procedures have allowed researchers studying animal spatial cognition to develop a complex understanding of the involvement of the hippocampus for successful navigation within environments. This research has also put into question the original idea proposed by O’Keefe and Nadel (1978) that the hippocampus stores a cognitive map of the environment. Indeed, research over the past two decades has shown that lesions or damage to particular areas within the hippocampal structure result in differential performance in many tasks of place learning. However, particular to our review, recent studies (e.g., Sutherland, Chew, Baker, & Linggard, 1987) have shown that previous investigations which have reported that rats readily show novel shortcutting when placed at a novel starting point within the MWM (e.g., Morris, 1981) may have gathered information about the arena when initially learning the task – thus, putting into question the actual novelty of the novel starting points. Such careful behavioral research programs, in combination with physiological studies, continue to present new challenges to current theories of place learning. Human Research Adopting the Three Prominent Tasks Traditionally, many studies of human spatial cognition have adopted either paper-and-pencil tasks (e.g., the Mental Rotations test: Vandenberg & Kuse, 1978; and the Object Location Memory test: Eals & Silverman, 1994; Silverman & Eals, 1992) or real-world tasks to examine how people use environmental cues to learn a spatial layout. Two-dimensional tasks, such as traditional paper-and-pencil versions of spatial wayfinding tasks, have played a major role in our understanding of spatial cognition. However, the cognitive processing required during these tasks may be, and indeed has been argued to be, quite different than during navigation through a real-world environment (see Hegarty, Montello, Richardson, Ishikawa, & Lovelace, 2006). This concern has led many researchers to design investigations to directly compare the use of spatial cues and performance accuracy on two-dimensional wayfinding tasks with those conducted in real-world environments. Typical studies of real-world navigation require participants to learn a route though a room, a building, or an outdoor setting such as a university campus or a shopping center (e.g., Bell & Saucier, 2004; Foreman, Stanton-Fraser, Wilson, Duffy, & Parnell, 2005). Although real-world navigation tasks allow for an ecologically valid examination of spatial ability in comparison to standard paper-and-pencil tasks, such paradigms are not also without their drawbacks. Due to the large spatial scale of these tasks, they lack the precise control and manipulability necessary for examining many questions of spatial ability (e.g., it is difficult, if not impossible, to modify or remove large global cues). The physical nature of a wayfinding task, although not necessarily challenging for young adults, the focal group for many of these studies, may be too demanding for some older adults for which spatial abilities is an important field of study. Furthermore, real-world navigation tasks by their very nature require a moving participant and thus cannot be used for brain imaging studies important for the understanding of neurological foundations of navigation and subsequent linkage with the vast amount of non-human studies in this area. Recent technological advances have allowed for new approaches to examine human spatial learning. In particular, the use of computer-generated immersive virtual realities and virtual environments appears to be quite fruitful for furthering our knowledge of spatial cognition. Immersive virtual reality (VR) and desktop virtual environments (VE) have proven useful as evaluative tools for behavioral and cognitive assessments as well as experimental investigations of spatial learning (Skelton, Ross, Nerad, & Livingstone, 2006). Typically, VR is characterized as the participant obtaining a sense of participating within the environment being shown. Technology such as the CAVE (CAVE Automatic Virtual Environment: Cruz-Neira, Sandin, & DeFanti, 1993) or head-mounted displays in conjunction with a head tracker have been used to achieve this sense of immersion. Other interaction devices (e.g., VR gloves) may also be used. Studies which have examined spatial abilities using VR have shown that this approach may be very useful not only for understanding how space is being represented, but also as a possible assessment tool for examining spatial memory loss due to aging and/or cognitive disorders (e.g., Moffat, Zonderman, & Resnick, 2001; Rose et al., 1999). However, the technology required to investigate spatial abilities using a VR approach is still very expensive, cumbersome, and not easily portable. Furthermore, due to the immersive nature of the VR approach many participants experience "cybersickness," a type of motion sickness that may affect men and women, as well as young and older individuals, differently (e.g., Liu, Watson, & Miyazaki, 1999). An alternative, more economical and portable approach to investigating spatial abilities using a more ecologically valid approach is to use a VE task. VE tasks (as we are defining them) differ from VR in that the participant views a 3D environment with a lessened sense of immersion (this also reduces the experience of cybersickness). Desktop monitors or wide-screen projection units are the typical means of display. As in VR, this approach has also been used not only to investigate spatial abilities from a research point of view, but also has been evaluated as a tool for applied approaches to assessment and rehabilitation for individuals with spatial ability loss (Rizzo et al., 2001). Because the VE approach lends itself more readily to studies of a comparative nature, we will focus our review on research which has adopted this technology to investigate spatial learning in humans. Do VE approaches to the study of spatial learning have external validity? Is the spatial information presented using VE sufficient to generate similar spatial representations as that when one is navigating through a real-world environment? Studies using VE to simulate a task originally designed to study spatial learning in rodents may shed light on these questions. In the following sections we will review the three prominent tasks of spatial learning adopted from animal procedures to study human spatial navigation. Virtual Morris-type water maze task The virtual Morris-type water maze task (VMWM) is a computer-generated environment developed after the MWM, a very popular task to study non-human spatial memory (Astur, Ortiz, & Sutherland, 1998; Hamilton, Driscoll, & Sutherland, 2002; Hamilton & Sutherland, 1999). As discussed earlier in this review, in the original MWM task an animal is trained to locate a platform submerged in a pool of opaque water. Typically, distant featural cues are presented on the walls of the pool in a fixed spatial relationship to the submerged platform such that the animal can use these cues to accurately locate the platform. This task has been used extensively to examine the relationship between spatial memory and the hippocampus (e.g., O’Keefe & Nadel, 1978; Redish, 1999). The virtual version of this task presents a human participant with a similar visual experience. The participant views an arena that typically has featural cues on the walls and using a mouse or joystick can navigate to a hidden platform. The platform rises out of the water when the participant has successfully reached its location. As in the MWM, participants can begin each trial from several different locations. Hamilton et al. (2002) investigated whether humans navigating through a VMWM would form a topographical-like representation of the environment (supporting a cognitive mapping theory) or would form a viewpoint dependent representation of the environment (supporting an associative learning approach). Hamilton and colleagues trained participants to navigate directly from a starting position to a hidden platform within a VMWM. The participants were divided into independent groups based on the opportunity to view extra-maze cues (e.g., pictures on the walls) and/or to navigate through the entire arena or just half of the arena. By systematically limiting some of the groups’ experience with cues within the environment, or ability to navigate through only one half, Hamilton and colleagues were able to directly test whether participants could take novel routes to locate the goal when their original training routes were not available. The researchers found that the participants’ performance did not support a cognitive mapping theory of place learning; the participants that had their navigation restricted to one side of the arena showed an increase path length and latency to locate the platform when navigating on the novel side of the arena. The results of this study seem to contradict an earlier study by Jacobs, Laurance, and Thomas (1997) who found that humans navigating in a virtual environment showed good transfer from a limited set of training views to novel testing views. However, in the Jacob et al. study it is not clear whether participants locomoted through the entire environment when initially learning the task. If this was the case, the participants may have built up a representation of the entire environment even though their initial start locations were limited. Thus, the Hamilton et al. investigation provides a clearer examination of the viewpoint dependency in a virtual environment. The study by Hamilton et al. (2002) is particularly important for our understanding of spatial learning from a comparative point of view because it was designed to replicate a previous study conducted by Sutherland et al. (1987) using rats in a real-world MWM. Hamilton and colleagues found very comparable response patterns as those reported by Sutherland et al. Such a comparative approach to examining spatial learning lends support to the conclusions that humans navigating through a VMWM use similar spatial learning principles as seen by rats navigating in MWM. Furthermore, these comparative studies provide necessary bridges between human and non-human research on spatial learning—research necessary for furthering our understanding of the neurological mechanisms involved in spatial learning. Virtual radial arm maze task The virtual radial arm maze task (VRAM) is similar to the real-world counterpart in that a participant begins to navigate the maze at a central platform. From this central position, the navigator can transverse down one of (typically) eight arms (although 12 armed VRAM tasks have also been used, i.e., Levy, Astur, & Frick, 2005). Using the VRAM an experimenter may measure both working and reference memory components. As in the RAM, during the typical VRAM paradigm only half of the arms are baited (contain a reward), and the participant must use extramaze cues to remember which arms are rewarded and which ones are not; this is the reference memory component of the task. However, on a given trial the participant must also remember which arms s/he has visited to avoid making revisits; this is the working memory component of the task. Although the RAM has not received as much study as a virtual task compared to that of the MWM, and to our knowledge none of these studies have directly examined the properties of the spatial representation, we have chosen to include it in our review because we would like to argue that this virtual task has much untapped potential for furthering our understanding of the properties of spatial learning. The majority of the studies to date that have used the VMWM have shown similar results to that found in non-human studies in real-world MWM. This is not so with the VRAM. For instance, Astur and colleagues have robustly shown that the participants navigating in the VRAM (either 8 or 12 arms) do not show the typical male superiority effect (Astur, Tropp, Sava, Constable, & Markus, 2004; Levy et al., 2005). This difference has lead Astur and colleagues to propose that the VMWM and the VRAM may differentially allow for spatial and non-spatial strategies in solving the task. The MWM and the RAM are considered gold standards among non-human spatial tasks. Using virtual versions of these tasks, where procedural differences in variables such as motivation, environmental cues, stress, and motor demands can be held constant, will allow for a better understanding of the underlying properties of spatial learning. Virtual geometric arena task Finally, the last type of virtual environment we will discuss in our review is the use of a virtual geometric arena task modeled after Cheng (1986). In one version of the task participants orient in a fully enclosed rectangular environment and are required to locate a reward consistently positioned at one of the four corners (Kelly & Bischof, 2005). Distinctive features are sometimes available, and at other times only the geometric properties of the environment can be used to differentiate the corners.
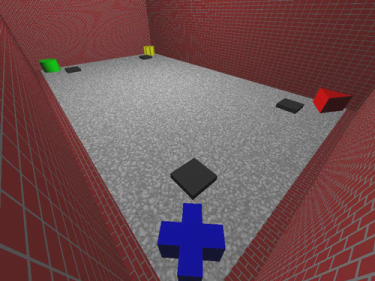
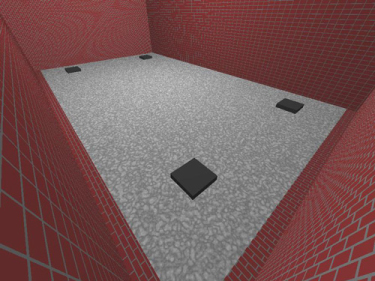
Kelly and Bischof (2005) examined the use of featural and geometric information by adults navigating in a virtual environment designed to be similar to the real-world environment experienced by Cheng’s (1986) rats. Men and women were trained to locate a goal in one of four corners of a fully enclosed rectangular room (see Figure 4). Contrary to real-world studies of this nature, in which participants were disoriented prior to the start of each trial, the participants were always oriented. Therefore, to ensure that the participants were using a spatial strategy when searching for the goal, rather than simply memorizing the absolute position of the goal on the screen of the monitor, the environment was shown from eight different viewpoints selected quasi-randomly across trials. One group of participants initially experienced the environment with distinctive featural information at each corner (see Figure 4), and once they were accurately locating the goal, they were given transformation tests which manipulated either the distinctive featural cues, the geometric properties of the environment, or both. Upon completion of the transformation tests this group was retrained in the same environment but now all of the distinctive features were removed (see Figure 4). Once the participants were accurately locating the goal in this modified environment, they were given transformation tests in which some aspect of the environment’s geometric properties were manipulated. A second group of participants received the same training and testing conditions, but in the opposite order (i.e., geometric training, geometric testing, feature training, and feature, geometric, or both testing). In one of the experiments in the Kelly and Bischof (2005) study, participants entered into the environment from a limited set of starting points. The researchers then tested the participants’ accuracy at locating the goal from novel starting points. The participants were just as accurate at finding the goal when staring from familiar or novel starting locations (in contrast to a similar study that used two-dimensional environments which showed viewpoint dependency for novel orientations; Kelly & Spetch, 2004). Thus, the results from this manipulation support the cognitive mapping theory. However, a weakness of this experiment is that although the participants had never viewed the environment from the novel start locations, the entire environment could be viewed from each initial training perspective. This aspect presents similar concerns as outlined previously with the Jacobs et al. (1997) study. Thus, we suggest a future approach that would address this concern would be to adopt a methodology similar to that of Hamilton et al. (2002) discussed earlier in this review. Limiting the amount of environmental information available to the participants from each training position would allow for subsequent novel tests which would allow for a more robust examination of viewpoint dependency. A second transformation test performed by Kelly and Bischof (2005), however, does provide more support for the cognitive mapping theory while questioning some of the assumptions of an associative learning hypothesis to place learning. Half of the participants in this study were trained with both featural and geometric cues available. The participants readily learned to use the featural cues to locate the goal; this was evident in that the participants directed the vast majority of their searches to the single rewarded corner. (Geometric cues alone would only allow the participants to differentiate the two geometrically correct corners from the two geometrically incorrect corners.) After training, the researchers presented the participants with a transformation test in which all of the distinctive featural cues were removed. The participants showed accurate performance in that they were able to use the geometric cues to search for the goal, up to rotational errors. Thus, during training the participants were encoding the featural and geometric information; the distinctive features were not overshadowing the geometric cues. This finding fits with the many non-human animal studies that have been unable to show overshadowing in this type of task (although this is in contrast to the overshadowing of the featural cues by the geometric cues in the original studies using this task, i.e., Cheng, 1986). Although the lack of overshadowing does not in itself refute the associative learning hypothesis, it raises questions as to why overshadowing has been found in several other place learning tasks but is difficult to find in studies using the geometric arena task. Is there something special about geometric information that is presented from surface cues that is different from geometric information supplied by discrete objects located within an environment? Preliminary studies suggest this might be so. Neurological Mechanisms: Human-based Research The RAM, the MWM, and more recently the geometric arena task have all been used to examine the neurological underpinnings of spatial navigation in animal-based experimentation, with focus being on the role of the hippocampus (for a review see Driscoll & Sutherland, 2005; see also Cheng & Newcombe, 2005). As discussed earlier in this review, the types of tasks used to examine human and non-human spatial learning have traditionally been quite different. The use of virtual environments have allowed experimenters interested in human spatial learning to utilize tasks quite similar to that used for the study of non-human spatial learning. This has in turn provided an excellent opportunity for more direct comparative studies of behavior and neurological processes involved in spatial memory. For example, using an fMRI approach Astur et al. (2005) found that human participants, similar to rodent-based studies, show bilateral changes in the hippocampus when navigating. The VMWM has also been adopted for studies addressing neurological questions of spatial navigation. Many investigations of navigation (and place learning) have shown that the VMWM requires the use of the hippocampus, as has been clearly demonstrated using the real-world version in rodents (e.g., VMWM: Hamilton et al., 2002; and MWM: Morris & Frey, 1997; Morris, Garrud, Rawlins, & O’Keefe, 1982). The VMWM has also been used as a tool for examining impairments in spatial ability associated with fetal alcohol syndrome (Hamilton, Kodituwakku, Sutherland, & Savage, 2003) and aging (Driscoll et al., 2003; Moffat & Resnick, 2002). At the time of this article, unfortunately, we are not aware of any studies adopting a virtual version that replicates a fully enclosed geometric arena adapted after Cheng (1986) to examine the neurological underpinning of reorientation. However, recently it has been suggested that an area in the human brain may be critically involved in the processing of geometric information – the parahippocampal place area (PPA). The PPA is an area that straddles the collateral sulcus near the parahippocampal/lingual boundary in both hemispheres. Neuroimaging studies show that the PPA responds selectively to the background or environmental information typically contained within scenic images and not to objects or featural cues. Activation of the PPA has been shown for natural and manmade environments. Carefully controlled studies support the idea that this area is particularly important for the processing of geometric spatial information (Epstein, 2005). One important example Epstein and colleagues have shown is that the representations of environmental information stored in the PPA are viewpoint dependent—a finding that weakens the cognitive mapping theory of place learning. Although the PPA cannot be considered as an anatomical equivalent of a module for the processing of geometric information, these neuroimaging studies provide a better understanding as to how the properties of an environment may be processed. The use of a virtual geometric arena will undoubtedly be an important tool for future research in the area of human spatial learning. Discussion and Directions for Future Research Traditionally investigations of non-human and human spatial abilities have used very different approaches to understanding the underlying mechanisms of spatial learning. Although these approaches and associated techniques have provided each respective research area with valuable information about spatial processes, one important problem has been the minimal communication between the two disciplines which share such a common interest. Studies of non-human spatial abilities have historically used tasks which require an animal to actively navigate through an environment in search of a reward or to escape an aversive experience. We have outlined three important tasks which have played an important role in the understanding of animal (primarily rodent) spatial memory: the Morris-type water maze (Morris, 1981), the radial arm maze (Olton & Samuelson, 1976), and the geometric area (e.g., Cheng, 1986). Research adopting these tasks (and other important tasks not reviewed here such as the T-maze) has led to a rich understanding of the neurobiology, behavior, and cognitive processing of spatial information by animals, although much is yet to be learned. Studies of human spatial abilities have historically used tasks which do not require the participant to actively navigate through an environment. A couple of classic paradigms used to study spatial abilities are the Mental Rotations test (Vandenberg & Kuse, 1978) and Object Location Memory test (Eals & Silverman, 1994; Silverman & Eals, 1992) as well as many different versions of two-dimensional mapping tasks (e.g., Richardson, Montello, & Hegarty, 1999). Although research with these tasks have also led to significant strides in understanding spatial abilities (e.g., behavioral and cognitive changes influenced by aging, sex differences, or neurodegenerative diseases), less is known about the neurobiology of human spatial processing in comparison to that of non-human animals (Driscoll & Sutherland, 2005), and it is not clear whether these two-dimensional tasks require similar processing of spatial information as in three-dimensional tasks. The different types of tasks used by researchers examining non-human spatial abilities and researchers examining human spatial abilities has made interdisciplinary or comparative approaches to understanding spatial processing difficult. However, recent advances in technology have begun to bridge this divide. Experimental programs using virtual environments (and virtual realities) have allowed researchers studying human spatial abilities to adopt modified versions of animal tasks to study human participants: virtual water mazes, virtual radial mazes, and virtual geometric arenas. This approach in combination with advances in neuroimaging techniques have provided researchers with an opportunity to develop new comparative research programs centered on the understanding of spatial processing. The focus of our review was to examine studies of human spatial learning that have attempted to use virtual versions of techniques developed for the investigation of non-human spatial learning. We chose to focus on three techniques prominent to the study of non-human spatial learning, techniques that have been referred to as gold standards for investigating animal spatial learning, in particular the MWM and the RAM. We also included the geometric arena task because this task has considerably furthered our understanding of the processing of geometric information as well as generating significant interdisciplinary research. The framework of our review was to focus on two major theories of spatial learning: the associative learning approach and the cognitive mapping theory. Many recent studies of human spatial learning and memory have supported the idea that as people move about their environment they form a spatial representation that is viewpoint dependent. Our review of human spatial learning which has focused on the VMWM, VRAM, and the virtual geometric arena show some preliminary support of this view, but by no means refutes the cognitive mapping theory. Studies using the VMWM have provided the most robust examination of these approaches to spatial learning—in particular the research of Hamilton et al. (2002). We think it is interesting to note that the impetus of this investigation was a non-human animal study in the MWM. Furthermore, preliminary studies using the virtual geometric arena show strong future promise. Although initial investigations have been unable to rule out the possibility that participants are able to build viewpoint dependent representations into a cognitive map-like representation, we would like to argue that future research is needed with this task. In particular, it is curious that in the geometric arena task (both real-world and virtual) researchers have predominately been unable to show overshadowing and blocking of geometric cues by features (though see Gray, Bloomfield, Ferrey, Spetch, & Sturdy, 2005). In a similar fashion, we see an increased need to examine the principles of spatial learning using the VRAM. Although this task has been particularly important for the study of animal spatial learning, it has not been used often as a virtual tool for examining human spatial learning. Yet, the few studies that have been completed raise some important questions regarding the possibility that this task may call upon spatial abilities to a different degree than the MWM. Finally, our review may appear to suggest that the development of virtual environments have created a unidirectional advancement and transfer of information from animal-based studies to human-based studies. Many studies have shown that this is not so. We would like to point out two interesting examples of the use of virtual environments in an animal-based approach: the study of pigeons cognitive processing of directional motion and the study of the looming response of insects. Cook, Shaw, and Blaisdell (2001) used a virtual environment to examine whether pigeons could discriminate whether path of movement (i.e., the perspective of the camera) towards an object with a hollowed center was such that the camera would pass through the object’s center or would move around the object. Interestingly, the researchers found that the pigeons were able to discriminate, by responding differently, to the two scenarios. Furthermore, the birds showed strong transfer to a novel object, as well as disrupted performance when the frames of the movie were shown out of sequence. Obviously, such an experiment would be impossible with real objects. In a program of study, Gray and colleagues have used a virtual reality approach to examine the neurobiology of the looming response of insects (Gray, Pawlowski, & Willis, 2002). These studies have found that the locusts’ (Locusta migratoria L.) response to looming objects is influenced by not only an object’s particular shape but also the angle of approach (Guest & Gray, 2006). Furthermore, Gray has shown that when a visual neuron is habituated to a particular object with a determined trajectory, changes to either the object properties or the trajectory result in dishabituation at the neuronal level (Gray, 2005). Using a virtual approach to understanding both the behavioral and neurobiology of looming responses in this species of locust has allowed researchers to address questions that would be impossible in a real-world environment. Thus, although using virtual environments for animal-based studies requires the consideration of many additional issues, such as the sensory system of the species being examined, if used wisely this technique offers many exciting possibilities. The last decade has witnessed an important shift in the examination of human spatial memory through the use of virtual environments to replicate well studied animal paradigms. In our review, we argue that the adoption of a comparative perspective has begun to enhance our understanding of the properties underlying spatial learning. We have outlined specific areas that we suggest to be important for future areas of research using both human and non-human research paradigms. We anxiously await the next decade to see how the techniques outlined in our review and other technological developments will continue to inform current theories of spatial learning and more generally influence the field of comparative cognition. References Astur, R. S., Ortiz, M. L., & Sutherland, R. J. (1998). A characterization of performance by men and women in a virtual Morris water task: A large and reliable sex difference. Behavioral Brain Research, 93, 185-190. Astur, R. S., St. Germain, S. A., Baker, E. K., Calhoun, V., Pearlson, G. D., & Constable, R. T. (2005). fMRI hippocampal activity during a virtual radial arm maze. Applied Psychophysiology and Biofeedback, 30, 307-317. Astur, R. S., Tropp, J., Sava, S., Constable, R. T., & Markus, E. J. (2004). Sex differences and correlations in a virtual Morris water task, a virtual radial arm maze, and mental rotation. Behavioural Brain Research, 151, 103-115. Babb, S. J., & Crystal, J. D. (2005). Discrimination of what, when, and where: Implications for episodic-like memory in rats. Learning and Motivation, 36, 177-189. Bell, S., & Saucier, D. (2004). Relationship among environmental pointing accuracy, mental rotations, and hormones. Environment and Behavior, 36, 251-265. Bingman, V. P., Erichsen, J. T., Anderson, J. D., Good, M. A., & Pearce, J. M. (2006). Spared feature-structure discrimination but diminished salience of environmental geometry in hippocampal-lesioned homing pigeons (Columba livia). Behavioral Neuroscience, 120, 835-841. Brandeis, R., Brandys, Y., & Yehuda, S. (1989). The use of the Morris Water Maze in the study of memory and learning. International Journal of Neuroscience, 48, 29-69. Cheng, K. (1986). A purely geometric module in the rat’s spatial representation. Cognition, 23, 149-178. Cheng, K., & Newcombe, N. S. (2005). Is there a geometric module for spatial orientation? Squaring theory and evidence. Psychonomic Bulletin & Review, 12, 1-23. Cook, R. G., Shaw, R., & Blaisdell, A. P. (2001). Dynamic object perception by pigeons: Discrimination of action in video presentations. Animal Cognition, 4, 137-146. Cruz-Neira, C., Sandin, T. A., & DeFanti, R. V. (1993). Surround-screen projection-based virtual reality: The design and implementation of the CAVE. Proceedings of SIGGRAPH 1993, 135-142. Diez-Chamizo, V., Sterio, D., & Mackintosh, N. J. (1985). Blocking and overshadowing between intra-maze and extra-maze cues: A test of the independence of locale and guidance learning. The Quarterly Journal of Experimental Psychology, 37B, 235-253. Driscoll, I., Hamilton, D. A., Petropoulus, H., Yeo, R. A., Brooks, W. M., Baumgartner, R. N., et al. (2003). The aging hippocampus: Cognitive, biochemical and structural findings. Cerebral Cortex, 13, 1344-1351. Driscoll, I., & Sutherland, R. J. (2005). The aging hippocampus: Navigating between rat and human experiments. Reviews in Neurosciences, 16, 87-121. Eals, M., & Silverman, I. (1994). The hunter-gatherer theory of spatial sex differences: Proximate factors mediating the female advantage in recall of object arrays. Ethology and Sociobiology, 15, 95-105. Epstein, R. A. (2005). The cortical basis of visual scene processing. Visual Cognition, 12, 954-978. Foreman, N., Stanton-Fraser, D., Wilson, P. N., Duffy, H., & Parnell, R. (2005). Transfer of spatial knowledge to a two-level shopping mall in older people, following virtual exploration. Environment and Behavior, 37, 275-292. Gallistel, C. R., (1990). The organization of learning. Cambridge, MA: MIT Press. Gavrilov, V. V., Wiener, S. I., & Berthoz, A. (1998). Discharge correlates of hippocampal complex spike neurons in behaving rats passively displaced on a mobile robot. Hippocampus, 8, 475-490. Gibbons, A. (2001). The peopling of the Pacific. Science, 291, 1735-1737. Gibson, B. M., & Shettleworth, S. J. (2005). Place versus response learning revisited: Tests of blocking on the radial maze. Behavioral Neuroscience, 119, 567-586. Gouteux, S., Thinus-Blanc, C., & Vauclair, J. (2001). Rhesus monkeys use geometric and nongeometric information during a reorientation task. Journal of Experimental Psychology: General, 130, 505-519. Gray, E. R., Bloomfield, L. L., Ferrey, A., Spetch, M. L., & Sturdy, C. B. (2005). Spatial encoding in mountain chickadees: Features Overshadow Geometry. Biology Letters, 1, 314-317. Gray, J. R. (2005). Habituated visual neurons in locusts remain sensitive to novel looming objects. Journal of Experimental Biology, 208, 2515-2532. Gray, J. R., Pawlowski, V., & Willis, M. A. (2002). A method for recording behavior and multineuronal CNS activity from tethered insects flying in virtual space. Journal of Neuroscience Methods, 120, 211-223. Guest, B. B., & Gray, J. R. (2006). Responses of a looming-sensitive neuron to compound and paired object approaches. Journal of Neurophysiology, 95, 1428-1441. Hamilton, D. A., Driscoll, I., & Sutherland, R. J. (2002). Human place learning in a virtual Morris water task: Some important constraints on the flexibility of place navigation. Behavioural Brain Research, 129, 159-170. Hamilton, D. A., Kodituwakku, P., Sutherland, R. J., & Savage, D. D. (2003). Children with Fetal Alcohol Syndrome are impaired at place learning but not cued-navigation in a virtual Morris water task. Behavioural Brain Research, 143, 85-94. Hamilton, D. A., & Sutherland, R. J. (1999). Blocking in human place learning: Evidence from virtual navigation. Psychobiology, 27, 453-461. Hegarty, M., Montello, D. R., Richardson, A. E., Ishikawa, T., & Lovelace, K. (2006). Spatial abilities at different scales: Individual differences in aptitude-test performance and spatial-layout learning. Intelligence, 34, 151-176. Hermer, L., & Spelke, E. (1994). A geometric process for spatial representation in young children. Nature, 370, 57-59. Hermer, L., & Spelke, E. (1996). Modularity and development: The case of spatial reorientation. Cognition, 61, 195-232. Hill, A. J., & Best, P. J. (1981). Effects of deafness and blindness on the spatial correlates of hippocampal unit activity in the rat. Experimental Neurology, 74, 204-217. Hodges, H. (1996). Maze procedures: The radial-arm and water maze compared. Cognitive Brain Research, 3, 167-181. Jacobs, W. J., Laurance, H. E., & Thomas, K. G. F. (1997). Place learning in virtual space I: Acquisition, overshadowing, and transfer. Learning and Motivation, 28, 521-541. Kelly, D. M., & Bischof, W. F. (2005). Reorienting in images of a three-dimensional environment. Journal of Experimental Psychology: Human Perception and Performance, 31, 1391-1403. Kelly, D. M., & Spetch, M. L. (2004). Reorientation in a two-dimensional environment: I. Do humans encode the featural and geometric properties of a two-dimensional schematic of a room? Journal of Comparative Psychology, 118, 82-94. Kelly, D. M., Spetch, M. L., & Heth, C. D. (1998). Pigeons’ (Columba livia) encoding of geometric and featural properties of a spatial environment. Journal of Comparative Psychology, 112, 259-269. Lackner, J. R., & DiZio, P. (2005). Vestibular, proprioceptive, and haptic contributions to spatial orientation. Annual Review of Psychology, 56, 115-147. Levy, L. J., Astur, R. S., & Frick, K. M. (2005). Men and women differ in object memory but not performance of a virtual radial maze. Behavioral Neuroscience, 119, 853-862. Lipp, H. P., Pleskacheva, M. G., Gossweiler, H., Ricceri, L., Smirnova, A. A., Garin, N. N., et al. (2001). A large outdoor radial maze for comparative studies in birds and mammals. Neuroscience and Biobehavioral Reviews, 25, 83-99. Liu, L., Watson, B., & Miyazaki, M. (1999). VR for the elderly: Quantitative and qualitative differences in performance with a driving simulator. Cyberpsychology and Behavior, 2, 567-576. Margules, J., & Gallistel, C. R. (1988). Heading in the rat: Determination by environmental shape. Animal Learning & Behavior, 16, 404-410. Markus, E. J., Barnes, C. A., McNaughton, B. L., Gladden, V. L., & Skaggs, W. E. (1994). Spatial information content and reliability of hippocampal CA1 neurons: Effects of visual input. Hippocampus, 4, 410-421. McDonald, R. J., & White, N. M. (1993). A triple dissociation of memory systems: Hippocampus, amygdala, and dorsal striatum. Behavioral Neuroscience, 107, 3-22. Moffat, S. D., & Resnick, S. M. (2002). Effects of age on virtual environment place navigation and allocentric cognitive mapping. Behavioral Neuroscience, 5, 851-859. Moffat, S. D., Zonderman, A. B., & Resnick, S. M. (2001). Age differences in spatial memory in a virtual environment navigation task. Neurobiology of Aging, 22, 787-796. Morris, R. G. M. (1981). Spatial localization does not require the presence of local cues. Learning and Motivation, 12, 239-260. Morris, R. G. M., & Frey, U. (1997). Hippocampal synaptic plasticity: Role in spatial learning or the automatic recording of attended experience? Philos. Trans. R. Soc. Lond. B. Biol. Sci., 352, 1489-1503. Morris, R. G. M., Garrud, P., Rawlins, J. N. P., & O’Keefe, J. (1982). Place navigation impaired in rats with hippocampal lesions. Nature, 297, 681-683. Muller, R. U., & Kubie, J. L. (1987). The effects of changes in the environment on the spatial firing of hippocampal complex-spike cells. Journal of Neuroscience, 7, 1951–1968. Olton, D. S., & Samuelson, R. J. (1976). Remembrance of places passed: Spatial memory in rats. Journal of Experimental Psychology: Animal Behavior Processes, 2, 97-116. O’Keefe, J., & Conway, D. H. (1978). Hippocampal place units in the freely moving rat: Why they fire where they fire. Experimental Brain Research, 31, 573- 590. O’Keefe, J., & Dostrovsky, J. (1971). The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research, 34, 171-175. O’Keefe, J., & Nadel, L. (1978). The hippocampus as a cognitive map. Oxford: Clarendon Press. Ossenkopp, K. P., & Hargreaves, E. L. (1993). Spatial learning in an enclosed eight-arm radial maze in rats with sodium arsanilate-induced labyrinthectomies. Behavioral & Neural Biology, 59, 253-257. Redish, A. D., (1999). Beyond the cognitive map: From place cells to episodic memory. Cambridge, MA: MIT Press. Richardson, A. E., Montello, D. R., & Hegarty, M. (1999). Spatial knowledge acquisition from maps and from navigation in real and virtual environments. Memory & Cognition, 27, 741-750. Rizzo, A. A., Buckwater, J. G., McGee, J. S., Bowerly, T., van der Zaag, C., Neumann, U., et al. (2001). Virtual environments for assessing and rehabilitating cognitive/functional performance. Presence, 10, 359-374. Roberts, A. D. L., & Pearce, J. M. (1999). Blocking in the Morris swimming pool. Journal of Experimental Psychology: Animal Behavior Processes, 25, 225-235. Rose, F. D., Brooks, B. M., Attree, E. A., Parslow, D. M., Leadbetter, A. G., McNeil, J. E., et al. (1999). A preliminary investigation into the use of virtual environments in memory retraining after vascular brain injury: Indications for future strategy? Disability & Rehabilitation, 21, 548-554. Save, E., Cressant, A., Thinus-Blanc, C., & Poucet, B. (1998). Spatial firing of hippocampal place cells in blind rats. Journal of Neuroscience, 18, 1818-1826. Save, E., Nerad, L., & Poucet, B. (2000). Contribution of multiple sensory information to place field stability in hippocampal place cells. Hippocampus, 10, 64-76. Shettleworth, S. J. (1998). Cognition, evolution, and behavior. New York: Oxford University Press. Silverman, I., & Eals, M. (1992). Sex differences in spatial abilities: Evolutionary theory and data. In J. Barkow, L. Cosmides, & J. Tooby (Eds.), The adapted mind: Evolutionary psychology and the generation of culture (pp. 533-549). New York: Oxford University Press. Skelton, R. W., Ross, S. P., Nerad, L., & Livingstone, S. A. (2006). Human spatial navigation deficits after traumatic brain injury shown in the arena maze, a virtual Morris water maze. Brain Injury, 20, 189-203. Sovrano, V. A., Bisazza, A., & Vallortigara, G. (2002). Modularity and spatial reorientation in a simple mind: Encoding of geometric and non-geometric properties of a spatial environment by fish. Cognition, 85, B51-B59. Sutherland R. J., Chew, G. L., Baker, J. C., & Linggard, R. C. (1987). Some limitations on the use of distal cues in place navigation by rats. Psychobiology, 15, 48-57. Taube, J. S. (1998). Head direction cells and the neurophysiological basis for a sense of direction. Progress in Neurobiology, 55, 225-256. Tolman, E. C. (1948). Cognitive maps in rats and men. Psychological Review, 55, 189-209. Vallortigara, G., Zanforlin, M., & Pasti, G. (1990). Geometric modules in animals’ spatial representations: A test with chicks (Gallus gallus domesticus). Journal of Comparative Psychology, 104, 248-254. Vandenberg, S. G., & Kuse, A. R. (1978). Mental rotations, a group test of three-dimensional spatial visualization. Perceptual and Motor Skills, 47, 599-604. Wang, R. F., & Spelke, E. S. (2002). Human spatial representation: Insights from animals. Trends in Cognitive Sciences, 6, 376-382. Wehner, R. (2003). Desert ant navigation: How miniature brains solve complex tasks. Journal of Comparative Physiology A: Neuroethology, Sensory, Neural, and Behavioral Physiology, 189, 579-588. |



Debbie M. Kelly, Department of Psychology, University of Saskatchewan, Saskatoon, Saskatchewan, Canada; Brett M. Gibson, Department of Psychology, University of New Hampshire.
|