FIGURE 1. Sample images used to produce a 3D model of a Chirotherium trackway (See results).

FIGURE 2. 1. Sparse point cloud generated by Bundler. Green, red, and yellow points indicate camera positions. 2. Dense point cloud generated by running CMVS and PMVS-2 on the output from Bundler.
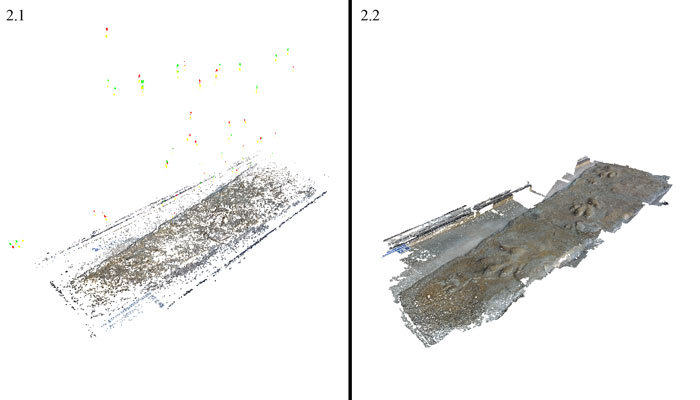
FIGURE 3. Images of specimens used for production of 3D digital models. From upper left clockwise: trilobite (Phacops latifrons), Chirotherium trackway, fossil tree (Stigmaria ficoides) root system, mounted Asian elephant skeleton (Elephas maximus).
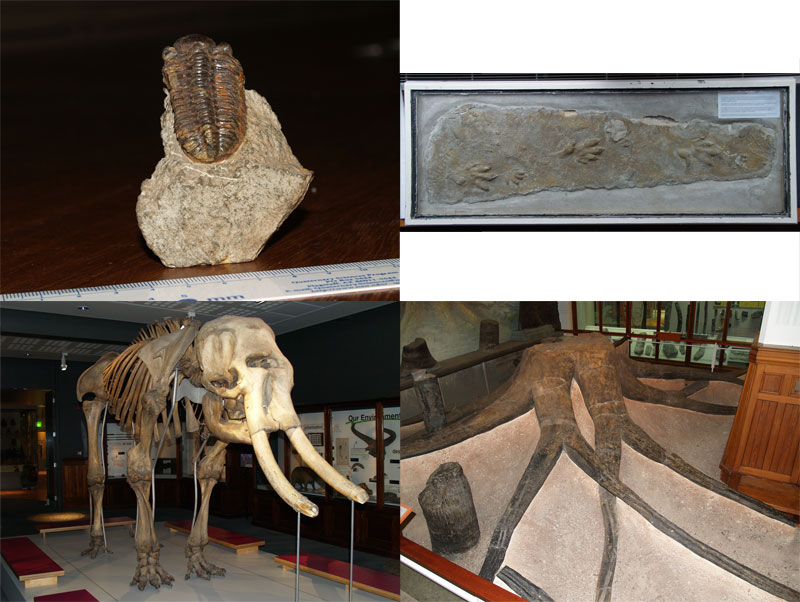
FIGURE 4. Dense point cloud of trilobite containing 179,294 points. Scale bar measuring millimetres is included in the point cloud.
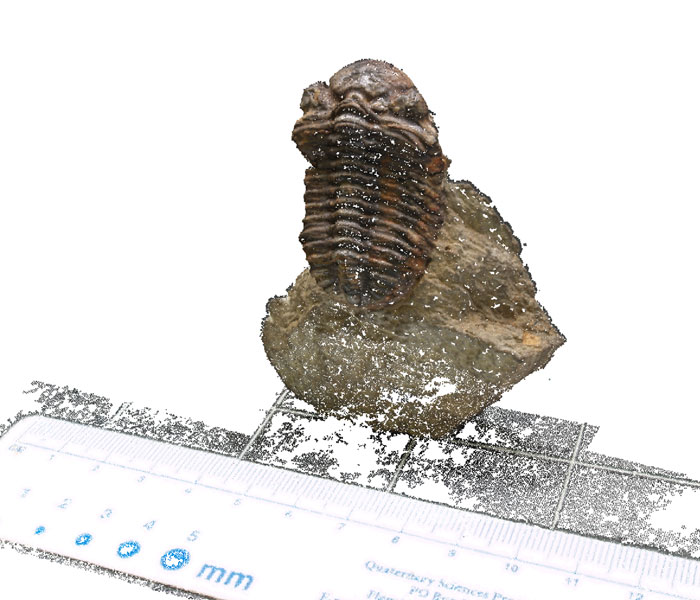
FIGURE 5. 3D digital model of Chirotherium trackway. 5.1 – Dense point cloud containing 2,171,040 points. 5.2 – 3D polygon mesh. 5.3 – Close up of area highlighted in 5.1 showing small vertebrate tracks and detail of rock surface. 5.4 – 3D polygon mesh coloured according to vertex angle (orientation of individual faces) to highlight topography.
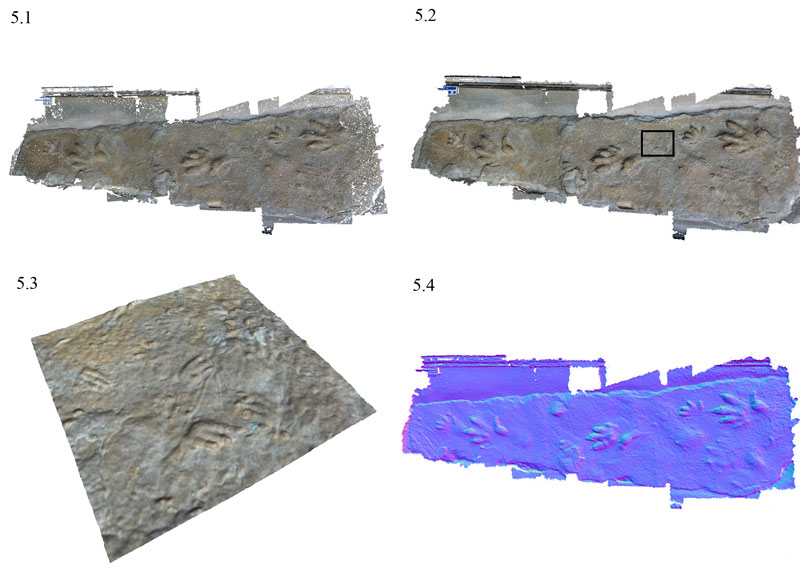
FIGURE 6. Dense Point cloud of mounted Asian elephant skeleton constructed from 207 photographs (comprising 2,090,058 points). Skeleton is ~3 m from tusk to tail.
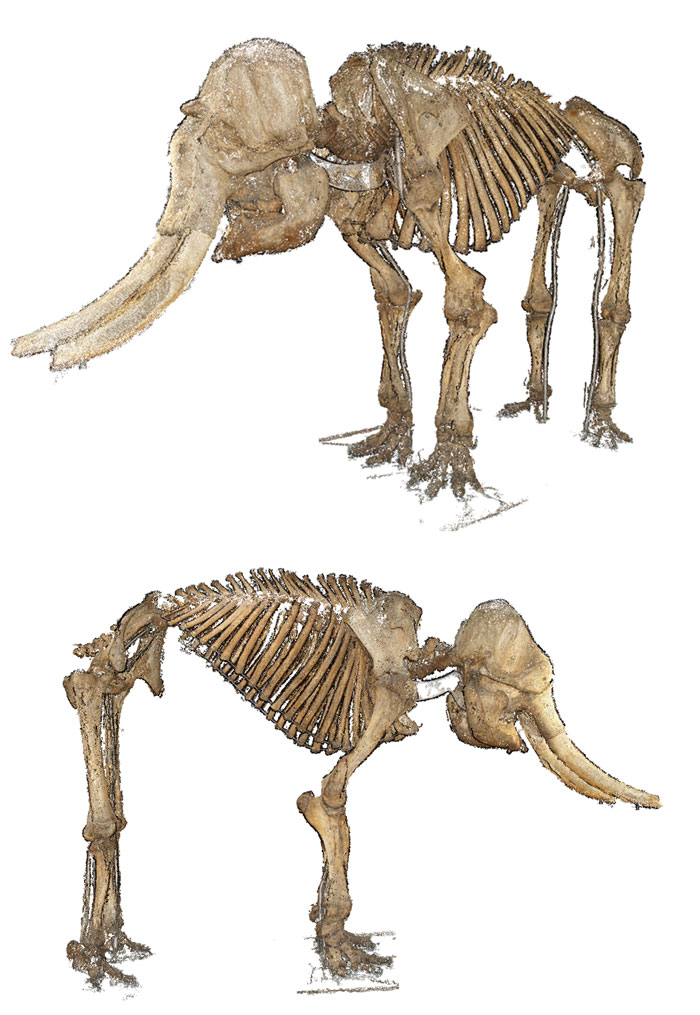
FIGURE 7. Comparison of dense point clouds produced using 44 (left) and 207 photographs (right). With additional photographs taken focusing on complex areas such as the jaw, the result is a considerably higher resolution point cloud.

FIGURE 8. 3D digital model of the tree root system. Above, dense point cloud consisting of 841,059 points. Below, polygon mesh. Tree root system is ~ 6 m in diameter.
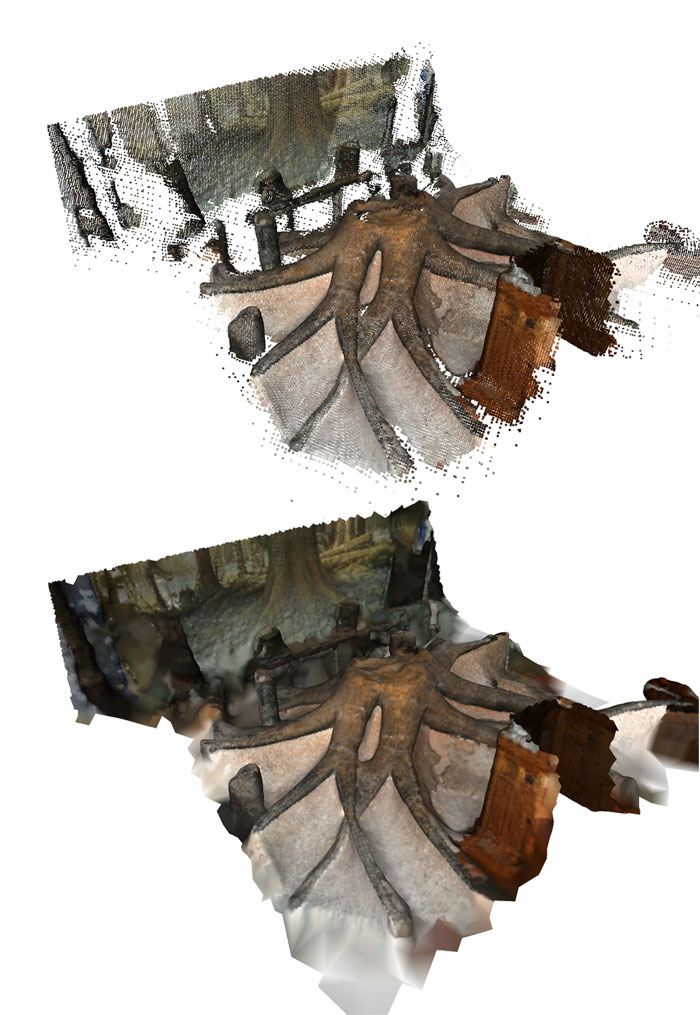
FIGURE 9. Dense point cloud of the Manchester Museum (field of view ~ 60 m). This point cloud contains 1,070,573 points.

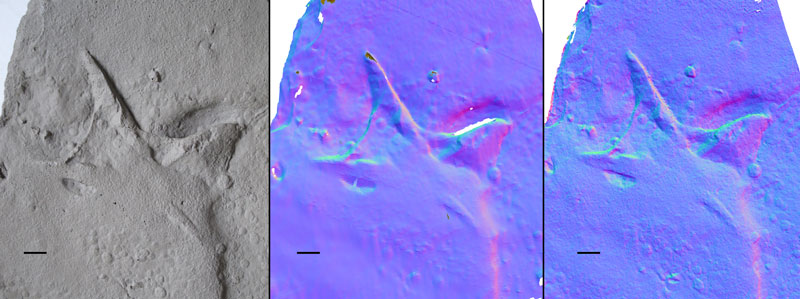
FIGURE 10. Comparison between photograph of specimen (left), 0.3 mm resolution laser scan (middle), and photogrammetric model (right). Visible area of laser scan consists of 96,832 vertices, and visible area of photogrammetric model contains 1,390,894 vertices. Scale bars equals 10 mm.